韓国科学技術院(KAIST)は9日、6日に東京国際フォーラムで開催された「SIGGRAPHアジア2024」のリアルタイムライブにおいて、ペ・ソクヒョン教授の産業デザイン学科研究チームとファン・ボジェミン教授の機械工学科研究チームが共同開発した「ロボットスケッチ(RobostSketch)」技術が最優秀審査員賞を受賞したと発表した。
「SIGGRAPHリアルタイムライブ」は、コンピュータグラフィックスおよびインタラクティブ分野における「夢の舞台」として知られている。毎年、世界中から厳選された10余りの革新的な技術のみがこの舞台に立つことができるという。
すべてのデモは事前録画なしにリアルタイムで行われ、6分という限られた時間内に技術の独創性と可能性を示さなければならない。KAISTのロボットスケッチは、この舞台で新しいロボットデザインプロセスの可能性を示し、大きな注目を集め、たった一つの技術に与えられる最優秀審査員賞を獲得した。
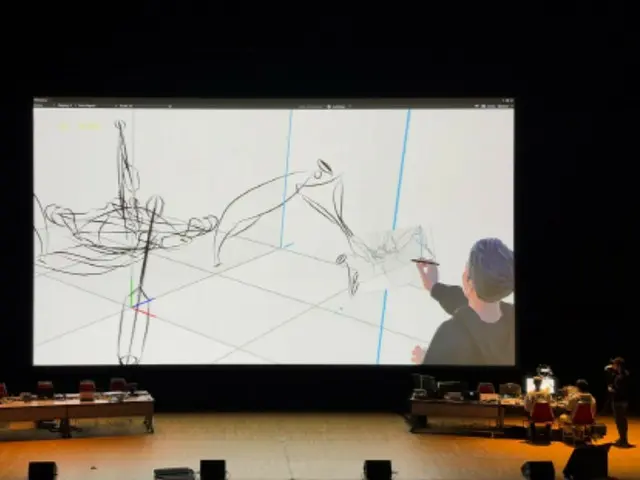
ロボットスケッチは、単に外観や構造を視覚的に表現する設計ツールを超え、3Dスケッチに生成型AIと没入型VRを組み合わせてロボットデザインの概念を新たに定義した革新的な技術。デザイナーはVR環境でタブレットとペンを使って複雑な関節型構造を直感的に表現し、これを実際のサイズで確認することが可能だ。
デザイナーが描いたロボットは、強化学習を通じて現実世界の物理法則に従うシミュレーション内で歩行法や動きを学習する。これにより、デザイナーは実世界で動作可能なロボットデザインをVR空間内で作成し、ロボットを直接動かして、その動作の自然さや安定性をリアルタイムで見極められる。
ロボットスケッチは、3Dスケッチの専門家であるペ教授の研究チームとファン教授の研究チームの協力によって完成した。ペ教授は、「これまでのロボットデザインの限界を克服し、ロボットデザイナーが想像するすべてをリアルタイムで表現できるツールを作りたかった」と述べた。
さらに、「ロボットデザインは単に外観だけでなく、ロボットの動き、機能、さらにはユーザーとの相互作用まで含むプロセスだ。ロボットデザイナーとロボットエンジニアの円滑なコミュニケーションを促進し、現実のプロトタイピングにかかる時間とコストを大幅に削減できるロボットスケッチは、今後のロボット開発と製品化過程において重要なツールとなるだろう」と付け加えた。
Copyrights(C) Herald wowkorea.jp 104